
第五章:弹性力学问题的基本解法
弹性力学问题的基本解法包括位移解法、应力解法和应力函数解法等。位移解法以位移分量为基本未知量,将几何方程和本构关系代入平衡方程,得到关于位移的偏微分方程组(拉梅-纳维方程);应力解法以应力分量为基本未知量,将本构关系代入应变协调方程,得到关于应力的偏微分方程组(贝尔脱拉密-密乞尔方程);应力函数解法则是引入适当应力函数,使平衡方程自动满足,仅需解关于应力函数的偏微分方程及相应边界条件。
除基本解法外,实际求解过程中常采用逆解法和半逆解法等求解方式。逆解法是先假设满足基本微分方程的一组解,再反推出这个解对应的边界载荷性质;半逆法则是根据边界条件特点或对域内应力应变状态的定性估计,假设一个能满足部分边界条件的解函数形式,再调整待定成分使满足全部方程和边界条件。
本章将系统介绍应力函数解法,并通过平面问题的直角坐标和极坐标解法展示该方法的应用。
注
本章的所有讨论均基于二维弹性力学问题,且认为介质具有各向同性。
1 应力函数
1.1 应力函数的基本概念
二维问题的平衡方程为
若体力有势(),则可引入艾里(Airy)应力函数 ,使
这样,平衡方程便自动满足。
1.2 使用应力函数的应力解法
将应力函数表达式代入平面问题的应力协调方程可得
平面应变问题
平面应力问题
对于无体力或常体力情况,二者形式相同,为重调和方程
注
本章后续的讨论,均默认为无体力或常体力情况,对重调和方程进行求解。
应力函数法将求解应力协调方程和平衡方程的问题,转换为求解一个四阶偏微分方程。
1.3 应力函数的性质
性质1:可加性
应力函数可确定到只差一个线性函数的程度。
其中 , , 为任意常数。由于应力是应力函数的二阶导数,线性项不影响应力分布。
性质2:边界性质
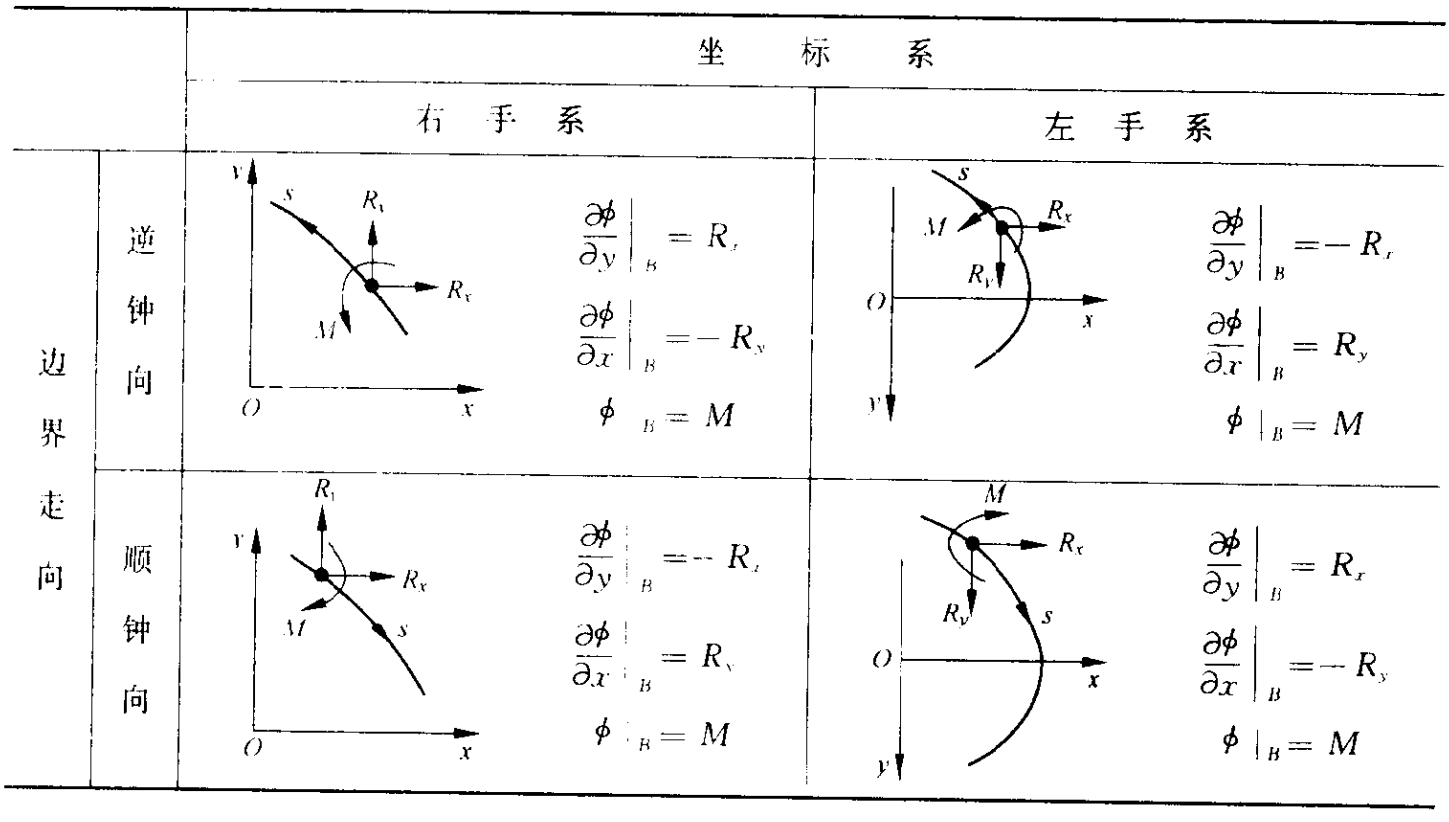
在边界上,应力函数及其一阶导数的值由边界载荷的主矩和主矢量确定。
以边界上某点 A 为参考点,令 ,,(这可以由添加线性函数做到),则在任意边界点B处
其中 为 AB 段边界载荷对 B 点的力矩, 和 分别为 AB 段边界载荷在 和 方向的合力分量。
注
上式中边界走向严格为逆时针, 和 均以坐标轴正向为正,采用右手系。
性质3:单值条件
应力函数的单值条件是:作用在物体一个闭合界面上的全部载荷构成自平衡力系。
平面问题的面内载荷都是自平衡力系,所以单连体内的应力函数必定单值。多连体有多个闭合边界,每边所受的载荷不一定自平衡,因而应力函数可能多值,但多值性仅影响 及其一阶导数,应力仍是单值的。
2 平面问题的直角坐标解法
将应力函数 表示成多项式形式:
其中,低于四次的项自动满足重调和方程,因此对于无体力或常体力问题,可以采用半逆解法,利用边界条件反解系数。
二次项:
- , , (单向拉伸状态)
- , , (单向拉伸状态)
- , , (纯剪切状态)
三次项:
- , ,
- , ,
- , ,
- , ,
3 平面问题的极坐标解法
3.1 极坐标系下的控制方程
在极坐标 下,控制方程的形式产生变化:
- 平衡方程
- 几何方程
- 本构方程
除此之外,应力函数的定义以及重调和方程的形式变为:
3.2 平面轴对称问题
几何形状和载荷分布都与环向坐标 无关的平面问题称为平面轴对称问题。应力函数简化为 ,重调和方程变为:
解得:
应力分量为:
实心圆筒问题
半径为 的实心圆筒,外壁受压 。因此边界条件为
实心圆筒为一个单连体,因此要求应力函数为单值,所以有
带入边界条件解得
故
厚壁圆筒问题
内外半径分别为 和 的圆筒,内壁受压 ,外壁受压 。因此边界条件为
厚壁圆筒为一个多连体,因此由应力协调方程不能推出位移单值连续,需要引入格外的约束。
由本构关系得
注
为常系数,由平面应变/应力问题决定。
对应变积分得到位移的表达式为
位移单值条件要求 ,于是
注
和 对应刚体的位移, 对应刚体的转动。
其中常数 和 可由力边界条件或位移边界条件确定。最终解得
这便是著名的拉梅(Lame)公式。它与弹性常数无关,因而同时适用于两类平面问题。
3.3 平面非轴对称问题:圆孔的应力集中
考虑无限大的薄板中有一半径为 的小圆孔, 方向受拉力 , 方向受拉力 。
考虑一半径为 的圆孔的同心圆(),由圣维南原理,同心圆上的应力状态可以认为和无小孔的薄板时的情形相同,将其写为极坐标形式,即
故问题可以转化为两个厚壁圆筒问题的叠加,其边界条件为
注
等向拉伸(或压缩)情形
以及
注
等值拉压情形
对于第一个厚壁圆筒问题,代入拉梅公式,再令 得
对于第二个厚壁圆筒问题,采用半逆解法,设应力函数为
代入重调和方程,解得:
根据边界条件反解出 代入应力表达式,再令 得
在孔边 上,当 和 时, 的应力集中系数为 ,当 和 时,。
3.4 空间问题:圆柱体的扭转
圆柱体长为 ,半径为 ,绕 轴轴对称,上下表面受一对大小为 的反向力矩作用,圆柱体整体无位移和旋转。
采用以下假设:
刚性转动假设:横截面绕轴线刚性旋转,其形状和大小保持不变。
注
设 ,其中 为常系数, 为旋转弧度。
等翘曲假设:所有横截面的纵向翘曲位移模式相同,与轴向位置无关。
注
设 。
3.4.1 微分方程
使用半逆解法,设位移为
由几何关系,应变为
由本构关系,应力为
则控制方程简化为
引入 Prandtl 应力函数 ,满足
则 (b) 式自动满足,代入 (a) 式得 Possion 方程
4.3.2 边界条件
侧面:
其中两式已满足,剩下
上式可以理解为
其中 是横截面边界上的微元,故 在任一截面的边界上都为常数,由于常数对于应力无影响,不妨设为 0。
上下端面:
上式左边可以转化为
4.3.3 问题的解
经过上述讨论问题转化为:
设
代入方程解得
进一步求位移
由几何关系可得到
注
对于椭圆柱体,仍有相同的边界条件,可设
此时有